- · 《昆虫学报》栏目设置[09/07]
- · 《昆虫学报》数据库收录[09/07]
- · 《昆虫学报》投稿方式[09/07]
- · 《昆虫学报》征稿要求[09/07]
- · 《昆虫学报》刊物宗旨[09/07]
一、来稿必须是作者独立取得的原创性学术研究成果,来稿的文字复制比(相似度或重复率)必须低于用稿标准,引用部分文字的要在参考文献中注明;署名和作者单位无误,未曾以任何形式用任何文种在国内外公开发表过;未一稿多投。 二、来稿除文中特别加以标注和致谢之外,不侵犯任何版权或损害第三方的任何其他权利。如果20天后未收到本刊的录用通知,可自行处理(双方另有约定的除外)。 三、来稿经审阅通过,编辑部会将修改意见反馈给您,您应在收到通知7天内提交修改稿。作者享有引用和复制该文的权利及著作权法的其它权利。 四、一般来说,4500字(电脑WORD统计,图表另计)以下的文章,不能说清问题,很难保证学术质量,本刊恕不受理。 五、论文格式及要素:标题、作者、工作单位全称(院系处室)、摘要、关键词、正文、注释、参考文献(遵从国家标准:GB\T7714-2005,点击查看参考文献格式示例)、作者简介(100字内)、联系方式(通信地址、邮编、电话、电子信箱)。 六、处理流程:(1) 通过电子邮件将稿件发到我刊唯一投稿信箱(2)我刊初审周期为2-3个工作日,请在投稿3天后查看您的邮箱,收阅我们的审稿回复或用稿通知;若30天内没有收到我们的回复,稿件可自行处理。(3)按用稿通知上的要求办理相关手续后,稿件将进入出版程序。(4) 杂志出刊后,我们会按照您提供的地址免费奉寄样刊。 七、凡向文教资料杂志社投稿者均被视为接受如下声明:(1)稿件必须是作者本人独立完成的,属原创作品(包括翻译),杜绝抄袭行为,严禁学术腐败现象,严格学术不端检测,如发现系抄袭作品并由此引起的一切责任均由作者本人承担,本刊不承担任何民事连带责任。(2)本刊发表的所有文章,除另有说明外,只代表作者本人的观点,不代表本刊观点。由此引发的任何纠纷和争议本刊不受任何牵连。(3)本刊拥有自主编辑权,但仅限于不违背作者原意的技术性调整。如必须进行重大改动的,编辑部有义务告知作者,或由作者授权编辑修改,或提出意见由作者自己修改。(4)作品在《文教资料》发表后,作者同意其电子版同时发布在文教资料杂志社官方网上。(5)作者同意将其拥有的对其论文的汇编权、翻译权、印刷版和电子版的复制权、网络传播权、发行权等权利在世界范围内无限期转让给《文教资料》杂志社。本刊在与国内外文献数据库或检索系统进行交流合作时,不再征询作者意见,并且不再支付稿酬。 九、特别欢迎用电子文档投稿,或邮寄编辑部,勿邮寄私人,以免延误稿件处理时间。
多位华人学者联手打造新一代小巧灵活的昆虫无
作者:网站采编关键词:
摘要:前言 受昆虫启发的飞行机器人:不仅能实现空中悬停,快速爬升,还可以实现空中翻滚,以及承受飞行过程中的人为碰撞。 昆虫非凡的技能特性帮助它们在空中世界中航行,其中包括
前言
受昆虫启发的飞行机器人:不仅能实现空中悬停,快速爬升,还可以实现空中翻滚,以及承受飞行过程中的人为碰撞。
昆虫非凡的技能特性帮助它们在空中世界中航行,其中包括所有的阵风、障碍和一般的不确定性。这样的特质也很难构建到飞行机器人中--但麻省理工学院副教授陈宇峰(Kevin Yufeng Chen)已经构建了一个接近昆虫敏捷性的系统。
 这项技术可以提高空中机器人的表演能力,使它们能够在狭窄的空间里操作,并能承受碰撞。
这项技术可以提高空中机器人的表演能力,使它们能够在狭窄的空间里操作,并能承受碰撞。
陈宇峰是电子工程与计算机科学系和电子学研究实验室的成员,他开发的昆虫大小的无人机具有前所未有的灵活性和弹性。这种空中机器人由一类新的软性执行器提供动力,使它们能够经受住现实世界飞行的物理苦难。陈宇峰希望这些机器人有朝一日能够帮助人类,为农作物授粉或在狭窄的空间内进行机械检查。
陈宇峰的研究成果本月出现在《IEEE Transactions on Robotics》杂志上。论文的合著者包括麻省理工学院博士生任志坚、哈佛大学博士生徐思怡和香港城市大学机器人学家Pakpong Chirarattananon。
通常情况下,无人机需要宽阔的空间,因为它们既不够灵活,无法在狭小的空间内航行,也不够坚固,无法承受人群中的碰撞。“如果我们看看今天的大多数无人机,它们通常相当大,”陈宇峰说。“它们的大多数应用都涉及在户外飞行。问题是:你能不能创造出昆虫规模的机器人,可以在非常复杂、杂乱的空间里移动?”
陈宇峰认为,“制造小型空中机器人的挑战是巨大的。” 小指大小的无人机需要的结构与大型无人机有着本质上的区别。大型无人机通常由电机驱动,但电机会随着尺寸的缩小而失去效率。因此,陈宇峰说,对于昆虫类机器人,“你需要寻找替代品”。
到目前为止,主要的替代方案是采用一种由压电陶瓷材料构建的小型刚性执行器。虽然压电陶瓷让第一代小型机器人得以飞行,但它们相当脆弱。而当你要制造一个模仿昆虫的机器人时,这是一个问题--觅食的大黄蜂大约每秒钟都要承受一次碰撞。
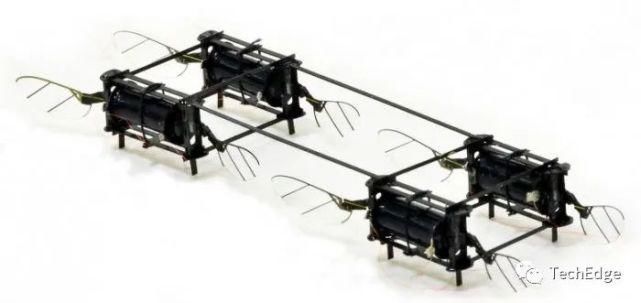
陈宇峰设计了一种更有弹性的小型无人机,使用软性的执行器代替坚硬易碎的执行器。软执行器由涂有碳纳米管的薄橡胶圆柱体制成。当对碳纳米管施加电压时,它们会产生一种静电,挤压并拉长橡胶圆柱体。反复的伸长和收缩导致无人机的翅膀跳动--快速。
陈宇峰的执行器每秒可以扇动近500次,使无人机具有昆虫般的弹性。“你可以在它飞行时击中它,它可以恢复,”陈宇峰说。“它还可以在空中做翻筋斗等攻击性动作。”而且它的重量只有0.6克,大约相当于一只大黄蜂的质量。这架无人机看起来有点像一盘带着翅膀的小磁带,不过陈宇峰正在研究一种形状像蜻蜓的新原型机。
“用厘米级的机器人实现飞行总是令人印象深刻的壮举,”康奈尔大学电气和计算机工程助理教授法Farrell Helbling说,他没有参与这项研究。“由于柔性执行器固有的顺应性,机器人可以安全地撞上障碍物,而不会大大抑制飞行。这一特点非常适合在杂乱的动态环境中飞行,对于任何数量的现实世界应用都可能非常有用。”
Helbling补充说,迈向这些应用的关键一步将是将机器人从有线电源中解脱出来,而目前执行器的高工作电压就需要这样的电源。“我很高兴看到作者将如何降低工作电压,以便有朝一日能够在现实世界的环境中实现无绳飞行。”
制造类似昆虫的机器人可以提供一个了解昆虫飞行的生物学和物理学的窗口,这是研究人员长期以来的一个探索途径。陈宇峰的工作通过一种逆向工程来解决这些问题。“如果你想了解昆虫如何飞行,建立一个规模的机器人模型是非常有指导意义的,”他说。“你可以扰动一些东西,看看它如何影响运动学或流体力的变化。这将帮助你理解那些东西是如何飞行的。”但陈宇峰的目标不仅仅是为昆虫学教科书“添砖加瓦”。他的无人机还可以在工业和农业中发挥作用。
陈宇峰表示,他的迷你航空器可以对复杂的机械进行导航,以确保安全和功能。“想一想对涡轮发动机的检查。你会希望一架无人机在(一个封闭的空间)里移动,用一个小相机来检查涡轮板上的裂缝。”
其他潜在的应用包括农作物的人工授粉或在灾难后完成搜索和救援任务。“所有这些事情对于现有的大型机器人来说都是非常具有挑战性的,”陈宇峰说。
src="http://p0.qhimgs4.com/t0114aab17414523478.jpg">恰佩克奖(The Capek Prize)由中国机电一体化技术应用协会主办,是以捷克科幻小说家,robot一词创造者卡雷尔·恰佩克(Karel Capek)的名字命名的奖项,创立于2014年。奖励在机器人领域作出贡献的组织和个人,旨在致力于做机器人行业发展的见证者,打造机器人行业的“诺贝尔”。
文章来源:《昆虫学报》 网址: http://www.kcxbzz.cn/zonghexinwen/2021/0311/584.html